The task of developing real-time Urban Management (UM) solutions based on intelligent UAV-based sensing requires the development of a large-scale, ambitious and integrative research framework. In this respect, the research for URANUS project will be organised in four interconnected research pillars, each contributing towards achieving the objectives of the project:
- Pillar 1 will explore UM monitoring to provide the necessary information for UM control and UAV operations planning.
- Pillar 2 will devise UM control solutions utilizing information from Pillar 1 about the current and future states of vehicular and pedestrian traffic, including their origins and destinations.
- Pillar 3 will develop multi-UAV trajectory planning algorithms based on the uncertainty of parameters of interest, derived from Pillars 1 and 2, and investigate the co-optimization of UAV operational planning and UM control.
- Pillar 4 aims to integrate, validate and evaluate the methodologies developed in Pillars 1-3 through traffic data generation missions, extensive simulation modelling and validation, and small-scale testing on real urban networks.
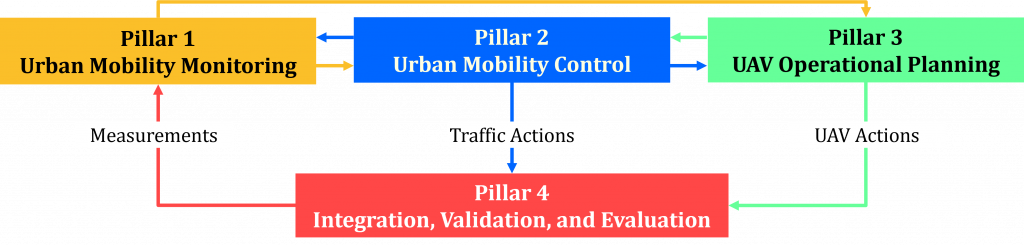
The four pillars will be interacting and co-dependent, as illustrated in the figure. In particular, Pillar 1 will make use of UM control actions and measurements produced in Pillars 2 and 4 respectively and provide estimates for the current and future states of the UM network and the corresponding uncertainty for Pillars 2 and 3 respectively. Using the estimates from Pillar 1 and information regarding UAV monitoring strategies from Pillar 3, Pillar 2 will produce UM control strategies used by Pillar 1 for predicting control actions, Pillar 3 to estimate the importance of UM variables and Pillar 4 for testing and validation. Additionally, Pillar 3 will utilize the aforementioned information received from Pillars 1 and 2 to provide suitable UAV control strategies, used for UM control, and validation and evaluation in Pillars 2 and 4 respectively. Finally, Pillar 4 will integrate the UAV and UM control schemes and produce suitable measurements for Pillar 1.